- Left click, select Open, select Bot Browser
- The upper left side of this browser represents categories of methods. The upper right shows the methods in each of these categories.
- Select the method category category on the left side.
- Draw a box "morph":
box: aRectangle "Draw a morph to represent the rectangle" | rm | rm := RectangleMorph new. rm bounds: aRectangle. rm color: Color transparent. rm setBorderWidth: 2 borderColor: Color blue. rm openInWorld.
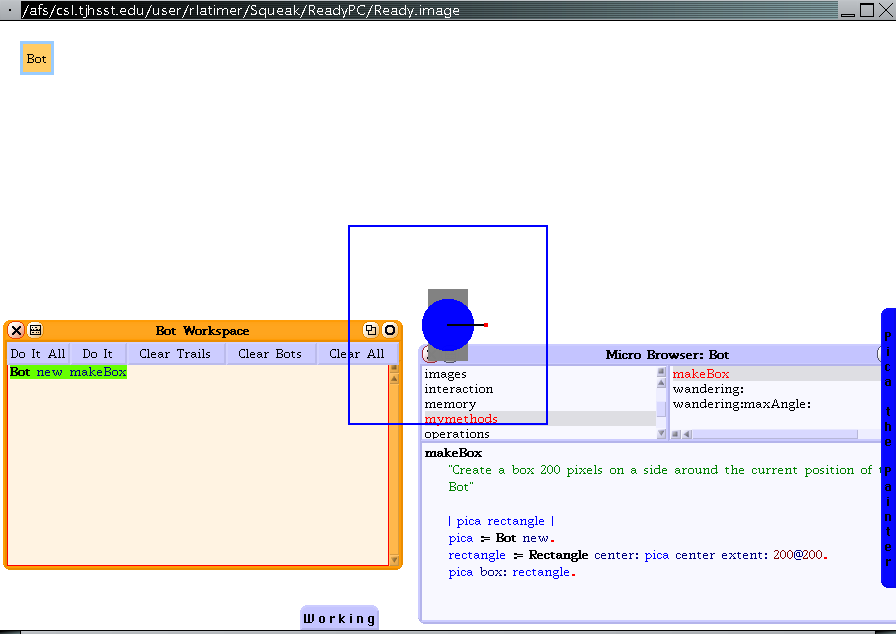
- A driver method for box:
makeBox "Create a box 200 pixels on a side around the current position of the Bot" | pica rectangle | pica := Bot new. rectangle := Rectangle center: pica center extent: 200@200. pica box: rectangle.
- accept this new method for your category mymethods
- Middle button or Right/Left click on the method definition and accept (s)
- In the Bot workspace window type: Bot new makeBox
- This creates a new Bot, sends it a makeBox message with no parameters.
- Middle button or Right/left click on this command and select Do it
- To Erase this box morph:
- Right click in the middle of the box morph. This brings up a "halo" menu.
- Select the "X" in the upper left corner. This should delete the box morph.
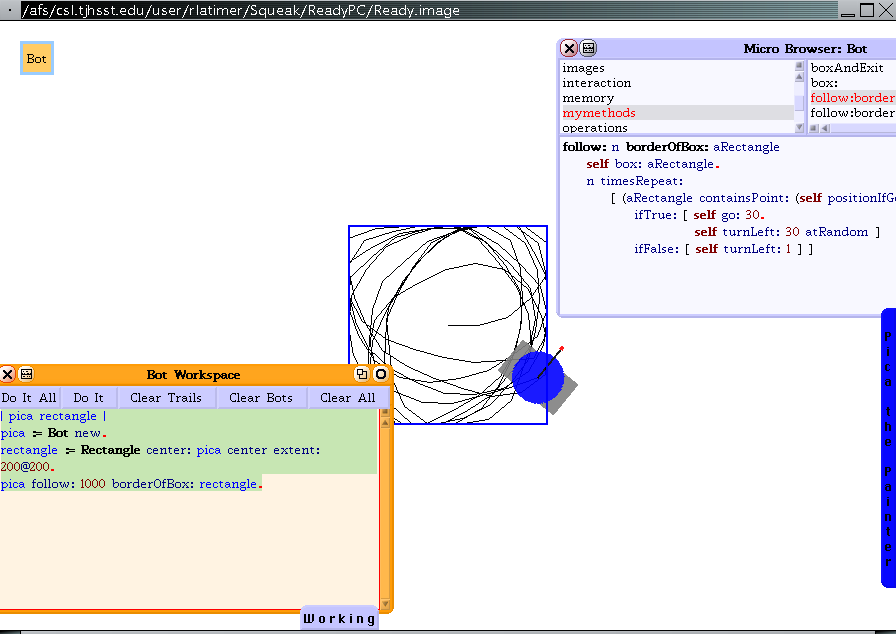
The follow method has two parameters, n and aRectangle. n represents
the number of times to move for the Bot. aRectangle represents the box morph:
-
follow: n borderOfBox: aRectangle self box: aRectangle. n timesRepeat: [ (aRectangle containsPoint: (self positionIfGo: 30)) ifTrue: [ self go: 30. self turnLeft: 30 atRandom ] ifFalse: [ self turnLeft: 1 ] ]
- accept this new definition. Middle button (Right/Left) click and accept (s)
| pica rectangle | pica := Bot new. rectangle := Rectangle center: pica center extent: 200@200. pica follow: 1000 borderOfBox: rectangle.
-
boxAndExit | box room room2 exit | box := Rectangle center: World center extent: 200@200. room := RectangleMorph new. room bounds: box. room color: Color transparent. room setBorderWidth: 2 borderColor: Color blue. room openInWorld. exit := Rectangle origin: (box topRight + (-2@25)) extent: 100@50. room2 := RectangleMorph new. room2 bounds: exit. room2 color: Color transparent. room2 setBorderWidth: 2 borderColor: Color black. room2 openInWorld.
- Accept this method with middle button (right/left click).
-
follow: n borderOfBox: aRectangle turnAngle: angle1 escapeAngle: angle2 n timesRepeat: [ (aRectangle containsPoint: (self positionIfGo: 30)) ifTrue: [ self go: 30. self turnLeft: angle1 atRandom ] ifFalse: [ self turnLeft: angle2 atRandom ] ]
- Accept the new method
-
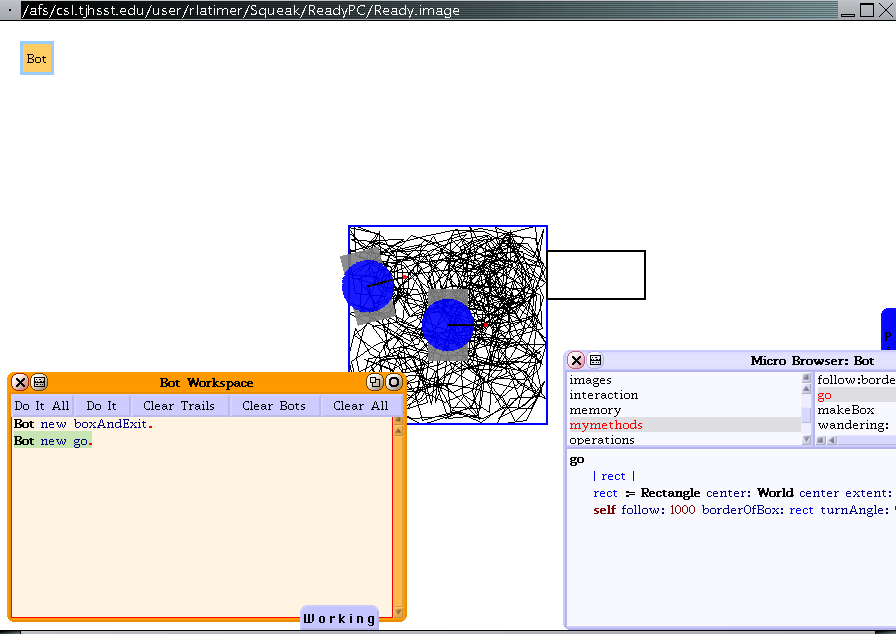
go | rect | rect := Rectangle center: World center extent: 200@200. self follow: 1000 borderOfBox: rect turnAngle: 90 escapeAngle: 360. - Accept this new method
- In the Bot workspace type: Bot new boxAndExit, DoIt.
- Bot new go Select just this line and DoIt/
Just this line, otherwise you'll keep drawing Rectangle morphs.
This will save your methods with a clear screen.